Animal collection, characteristics and care
For the experiments, we used a total of 24 P. elephas individuals of a wide range of sizes. Only inter-moult individuals with full sets of intact appendages were selected for this study.
We carefully collected 17 juveniles by hand while scuba diving in the Bay of Perros Guirec (48°50′2.044″ N, 3°26′28.312″ W) at depths between 10 and 25 ms during two diving sessions on May 28th, 2019. Juvenile individuals (3 males and 14 females) had carapace lengths (CLs) between 2.6 and 8 cm, as measured from the anterior tip of the rostrum to the medial point of the posterior carapace margin. Large adult individuals were bought from local fishermen several days after they were captured in the Iroise Sea on May 21st, 2019. These 7 large spiny lobsters (2 males and 5 females) had CLs between 9.5 and 13.5 cm.
After capture, all individuals were immediately transferred to an isolated, quiet room in the facilities of the Institut Universitaire Européen de la Mer (IUEM) in Plouzané (France). They were placed in holding tanks of different dimensions according to their size: three plastic-sided rectangular tanks (0.60 m × 0.50 m × 0.35 m, length × width × effective height; seawater volume = 0.1 m3) and two plastic-sided square tanks (1.0 m × 1.0 m × 0.6 m, 0.6 m3). There were 4 to 8 individuals per holding tank. Before they were placed in these tanks, all individuals were tagged using alternating small white and black rubber bands placed on the base of their second antennae. Each tagged individual was described (size, sex) and given an identification number.
Holding tanks were continuously supplied with the same sand-filtered seawater pumped from the Bay of Brest. During the holding period, temperature was 14.6 ± 0.6 °C and salinity was 34.7 ± 0.1. All animals were fed with fresh pieces of fish (mackerel) ad libitum. They were kept under a 12:12 photoperiod; daylight conditions (from 08:00 am to 08.00 pm) were simulated with fluorescent light tubes placed above the holding tanks. Several sections of rigid, PVC pipes associated with large rocks were provided as shelters in each tank. Animals were acclimatized at least 15 days in these holding conditions before they were used in the at-sea recording experiment.
Sound recordings and video
A linear array of 8 hydrophones was used to record sounds produced by the spiny lobsters (see Table 2 for characteristics of the recording devices). The 8 hydrophones were spaced relative to the handled spiny lobsters at 0.5, 1, 5, 10, 15, 20, 50 and 100 m. The 2 closest hydrophones (0.5 and 1 m) were set with a gain of 0 dB which permitted us to characterize the powerful antennal rasps without clipping the recorded sounds (i.e. sound saturation).
Video recordings were made during in situ recordings using two GoPro HERO3 cameras at a recording rate of 29.97 frames per second. The videos allowed confirmation of sound production by each spiny lobster tested, and also provided the time at which the handled individuals were placed at the source point during the sound recordings. They also validated the identification of each tested individual by checking the rubber bands on the spiny lobsters’ second antennae.
Location and characteristics of the experimental site
The experimental site where sound recordings were performed was located in the Bay of Saint Anne de Portzic (48°21’32.951” N, 4°32’59.024” W) in the Bay of Brest, just beneath the facilities of the IUEM where spiny lobsters were held. It was located about 100 m outside a marina hosting 120 recreational boats. It is a shallow water area with depths varying between 15 m during high tide and 9 m during low tide. The bottom is flat and composed of homogenous, fine sand with empty shells.
Experimental set up
The day prior the recording experiment, while scuba diving, all spiny lobsters were transferred into three galvanized steel cages (1.0 m × 1.0 m × 0.5 m, 0.5 m3) placed side by side linearly on the bottom near a rocky dyke. Sections of rigid PVC pipes were provided as shelters. Spiny lobsters were acclimatized for 24 hours in these conditions to recover from transport and handling.
The next day (June 14th, 2019), while scuba diving, the linear array of hydrophones was built in front of the center holding cage. First, a rope was laid on the substrate, which was previously marked at each distance where the different hydrophones should be placed. Then, hydrophones were attached 0.5 m above the bottom to metal rods anchored with concrete tubes at each mark placed on the rope. Cables were anchored to the bottom with lead weights and recorders were laid on the bottom. Because the Wildlife recorder had a positive buoyancy, it was anchored to the bottom using a lead weight. Thus, its hydrophone (placed at 50 m from the spiny lobsters) was located at 1 m above the bottom. The two cameras (same model GoPro as mentioned above) were placed on the top of the 2 outside cages, in front of the center cage. Then, the boat transporting scuba divers was anchored 200 m away from the cages, and its motor was shut down. Sound recordings were performed during low tide to avoid tidal currents. Before the recording experiment started, the ambient noise was recorded for 10 minutes without scuba divers underwater. Next, each spiny lobster was gently picked up, handled one by one, and positioned at the source point. The source point, defined as the point where spiny lobsters were recorded, was located at the beginning of the rope, at 0.5 m from the first hydrophone. Each individual was maintained at the same distance above the bottom (0.5 m) as the hydrophones during recordings, and the spiny lobsters were held so that they faced the linear array of hydrophones. Thus, the body of the animals was on the same axis as the linear array of hydrophones. We chose to handle spiny lobsters to elicit their sound production, as this method is commonly described in the bioacoustic literature on spiny lobsters15,16,25. Each sound recording for the different spiny lobsters lasted between 20 and 30 s. During each sound recording, the two scuba divers stopped their breath to avoid the emission of intrusive noise related to air bubbles. In total, the recording experiment lasted 60 min. In the end of the recordings, five sharp raps were made on the cage walls which permitted us to synchronize both hydrophones and GoPros.
Sound analysis
Sound features of antennal rasps
Synchronized recordings of sounds (in.wav format) and videos were first analyzed to confirm sound production by each tagged spiny lobster. Then, each antennal rasp was extracted manually using the Audacity software (version 2.1.146). Antennal rasps were defined as pulse trains composed of at least several pulses separated by less than 20 ms from each other. Hence, any isolated pulses present in the recordings were not analyzed here. We performed sound analysis on a total of 10 antennal rasps per spiny lobster and per distance (80 sounds analyzed per individual in total). The same sounds were analyzed at the 8 different distances for each spiny lobster. All sequences were then processed using custom MATLAB scripts (version 9.1; The MathWorks).
We calculated the intensity features of the antennal rasps based on their sound pressure levels (SPL, in dB re 1 µPa2) both in peak-to-peak (for biological interpretation) and root-mean-square (for detection range estimations using the passive sonar equation).
As these sounds are pulse trains characterized by short and transient pulses, we first chose to calculate the peak-to-peak SPL (SPLpp) which is the most representative and practical intensity feature for these types of biological sounds15,47. As we recorded antennal rasps at several distances from the spiny lobsters, the SPL calculated at 1 m was referred to as the source level (SLpp). When pulse trains were affected by low frequencies related to ambient noise (below 50 Hz), especially at long distances (50 and 100 m), we measured the SPLpp based on the pulse with the highest and lowest amplitude of the train to avoid overestimating their values. When pulse trains could not be isolated from the ambient noise, we did not calculate their SPLpp. We then averaged the SPLpp calculated per distance and per individual for further analysis. The SPLpp and SLpp were used for biological sound characterization. Because these values varied according to the body size of the spiny lobsters (see Results), we chose to regroup the averaged values per group of size-matched individuals for a better overall description. Four different groups of body sizes were defined and termed as follow: large (8.0 <CL < 13.5 cm, N = 9), intermediate (6.4 <CL < 7.3 cm, N = 7), small (4.2 <CL < 4.8 cm, N = 3) and very small (2.6 <CL < 3.1 cm, N = 5).
We also calculated the SPL and SL as root-mean-square (SPLrms and SLrms, respectively) by integrating the power spectral density (PSD, in dB re 1 µPa2.Hz−1) of the antennal rasps between 10 and 78 kHz (bandwidth where intensity from the antennal rasps remained above 10 m from the spiny lobsters, see Results). The SPLrms at 50 m was calculated over the 10–48 kHz frequency band, because the system specification did not allow measurements of frequencies above 48 kHz (see Table 2). Because antennal rasps are characterized by pulse trains, the SPLrms and SLrms values averaged on the entire length of the antennal rasps would be underestimated. We instead chose to calculate them on each pulse inside the pulse trains over a 1 ms window length (Fast-Fourrier Transform size: 156 points) centered on the pulse. Then, each value was averaged over all pulses present in an antennal rasp to obtain its mean SPLrms and SLrms. As for SPLpp and SLpp, the SPLrms and SLrms values were averaged on 10 antennal rasps per individual. The SPLrms and SLrms values were used to estimate transmission loss (TL), as well as to compute the passive sonar equation to estimate detection ranges42.
We also calculated the dominant frequency (in kHz) of each antennal rasp, represented as the frequency where the PSD was maximal. At large distances, some sounds were lost in the ambient noise while looking at the time domain signals, their SPLpp and SPLrms were thus not computed. However, they were still visible in the frequency domain; in this case, their dominant frequencies were estimated.
Ambient noise characterization
Recordings of ambient noise (10 min each) from the 8 hydrophones were first visualized to ensure the absence of antennal rasps. Because anthropogenic noise affected the ambient noise recordings during the experiment, sound sequences were both cut into 20 sequences of 30 seconds each, and we randomly selected 3 of 20 sequences from each recording. The sequences where anthropogenic noise (mainly shipping noise) was dominant were not taken into account in the analysis. We calculated the SPLrms of all selected 30 s long sequences. This SPLrms was calculated over the same frequency band as the antennal rasp SPLrms and SLrms (10–78 kHz), except for data from the Wildlife recorder, for which SPLrms was calculated over the 10–48 kHz frequency band. This provided a mean value for the ambient noise at each hydrophone placement, and was referred to the ambient noise level (ANL).
Evaluation of transmission losses
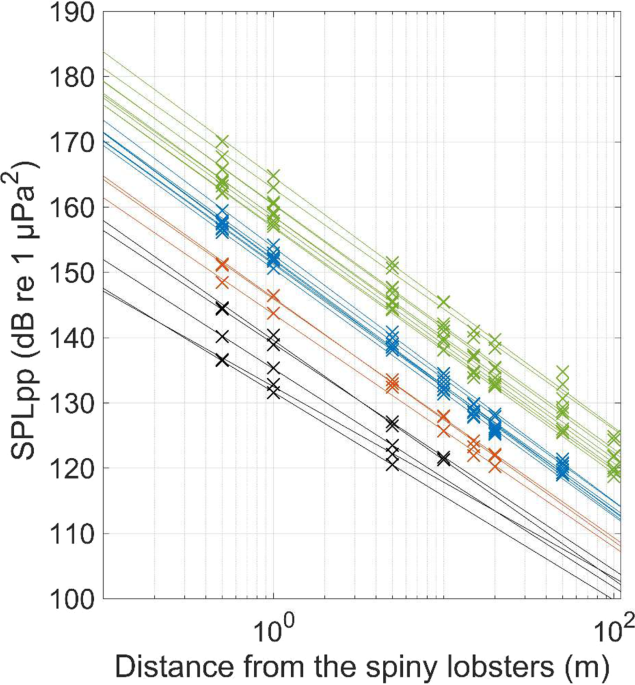
The datasets of the averaged SPLrms for each individual and for each distance were fitted with nonlinear least-squares regressions using custom-made scripts in MATLAB. We used the following equation42:
$${{rm{SPL}}}_{{rm{rms}}}={{rm{SL}}}_{{rm{rms}}}-{rm{TL}}$$
(1)
where TL is the transmission loss (in dB). TL represents the loss of intensity due to the geometrical spreading of sounds in a physical medium42, and was calculated as the slope of the logarithmic regression between SPLrms and the distance from the spiny lobsters, which was expressed as:
$${rm{TL}}=atimes {log }_{10}({rm{r}})$$
(2)
where r is the distance between the spiny lobsters and the hydrophones (in meters), and a is the geometrical TL term.
We obtained 19 different TL models using this method on the dataset generated by each animal (i.e. known SPLrms, SLrms and r). The measurements from the 5 very small individuals were not included in this analysis because we did not have enough measurement points as they were only detectable between up to 5 and 10 m (see Results). Moreover, a global TL coefficient was also estimated using a global dataset obtained by merging the sounds from the 19 spiny lobsters. We compared this global TL with other theoretical models of TL commonly used in the bioacoustic literature19. In theory, the spherical spreading loss (({rm{TL}}=20times {{rm{log }}}_{10}({rm{r}}))) prevails near the source where sound propagates uniformly in all directions. The cylindrical spreading loss (({rm{TL}}=10times {{rm{log }}}_{10}({rm{r}}))), prevails in shallow waters where sound cannot propagate as a spherical wave in all directions but only as a cylindrical wave bounded by the sea floor and the sea surface. We also used a combined TL, termed the ‘practical’ spreading loss (({rm{TL}}=15times {{rm{log }}}_{10}({rm{r}}))), which occurs between the prediction of the two other spreading models described above48.
Estimations of detection ranges
For the purpose of this study, we assumed that signal detection by hydrophones was primarily limited by the TL (previously calculated), the ANL and the absorption (α) of the high frequencies considering the detection ranges (i.e. kilometre scale).
Using the previous results, we estimated the detection ranges of the antennal rasps by resolving the passive sonar equation (in the frequency domain) for all 24 spiny lobsters42:
$${{rm{SL}}}_{{rm{rms}}}-{rm{TL}}-{rm{alpha }}-{rm{ANL}}={rm{SNR}}$$
(3)
Where:
SLrms is the source level in dB re 1 µPa2 (in root-mean-square; averaged on 10 measurements per spiny lobster), calculated in the 10–78 kHz frequency band42.
TL is the global coefficient of TL previously calculated for the 19 largest spiny lobsters. We also used the models of cylindrical and practical TL detailed above.
α is the coefficient of attenuation, depending on the frequency of the sound. Here, it was used at the dominant frequency that was commonly found above 10 m in the recorded antennal rasps, which was estimated at 30 kHz (see Results). Thus, the coefficient of absorption was calculated to be 7 dB per km49.
ANL is the ambient noise level in dB re 1 µPa2 (in root-mean-square) calculated over the same band of frequencies than the SLrms (10–78 kHz). We used two different values of ANL. First, we reported the mean ANL recorded by our hydrophones during the study. Second, we used one theoretical (but still realistic) value of ANL based on Wenz curves and calculated with a wind speed of 5 knots in the same frequency band than the ANL in situ33.
SNR is the signal-to-noise ratio which corresponds to the minimum threshold needed for the hydrophones to detect the sound above the ANL. We used two different SNRs of 5 and 10 dB widely accepted for sonar systems42.
Because our sound recordings were performed in shallow waters (<10 m), we considered the water column as non-stratified. Thus, the effects of sound speed were assumed to be independent of depth4, and were not taken into account in this equation. Also note that in theory, the absorption coefficient α should be embedded into our estimated TL model. However, the impact of α is relatively small over our array range, with a loss smaller than 1 dB, which is negligible with respect to the geometrical TL. On the other hand, at larger ranges, the impact of α becomes important. We thus decided to add α in Eq. (3); this ensures that detection ranges are not over estimated.
Statistical analysis
We examined the correlations between SLpp and TL with body size using Pearson tests (α = 0.05). Analysis were performed using R version 3.5.150.
Ethical statement
Experiments with European spiny lobsters are not subject to restriction for animal scientific research according to the French legislation and the European Community Council Directive of September 2010 (2010/63/UE). However, we followed the ARRIVE guidelines51 to ensure that all experiments were performed under good conditions. Animals were handled with care during the study and their health status were checked daily by the authors. No specimens were harmed during this study and there was no mortality. At the end of the study, 7 adults were kept in the laboratory for other experiments. All the other animals were released back into the environment where they were collected.
Source: Ecology - nature.com
